作者: Jun Han @ 复旦大学
发表在:Microelectronics Journal_2021(中科院三区)
简介
一款基于RISC-V处理器的手势识别SoC,仅通过图像处理算法来识别手移动的方向。
性能:输入320*240的图像,30帧/s,在与目标相距10cm~90cm & 目标速度在10 cm/s∼150 cm/s的情况下达到93%∼99%的精度。
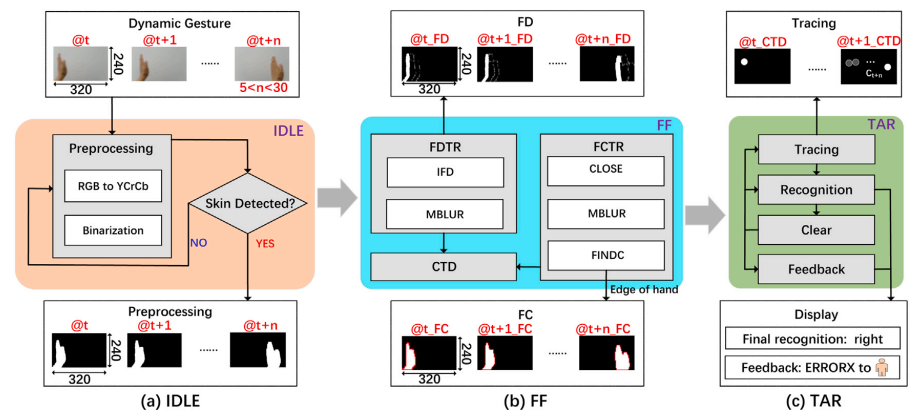
动态手势识别(dynamic gesture recognition DGR)算法
提出了一种对环境的识别能力、灵活性和适用性好且复杂度较低的算法:
首先逐像素从RGB色域转移到YCrCb色域,对于手来说,像素会落在YCrCb色域中的以下范围内:
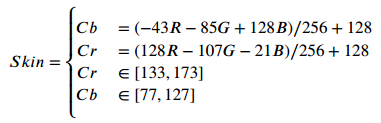
属于上述范围内的皮肤像素保留,并以此对整个画面做二值化处理。将皮肤像素的数量和预设的阈值相比较,即可判断画面中是否有人手。
提出了两种GR方法,来适应不用的应用场景,一种是inter-frame difference for gesture tracking and recognition (FDTR,帧间差分?),另一种是finding contours for gesture tracking and recognition (FCTR,寻找轮廓)。
FDTR适合在复杂背景下且画面中没有其它皮肤色物体的情况,而FCTR is suitable for one-handed movement with no or similar skin color
in the background(这是啥意思?)
FDTR对二值图像进行帧间差分(IFD)运算,得到包含手部运动区域的差分图像。其次,FDTR对差分图像进行中值模糊(MBLUR)运算,滤除光照不均匀引起的椒盐噪声。最后,由于差分图像只包含手的运动区域,质心(CTD)操作直接计算运动区域的质心,用于后续的跟踪和识别过程(TAR)。
FCTR首先对图像进行闭运算(先膨胀,后腐蚀)来得到完整的手部轮廓。其次,应用MBLUR,这与FDTR中的MBLUR相同。第三,查找轮廓操作(FINDC),与OpenCV的FindContours函数相同,查找手的轮廓并获得手的边缘。CTD通过边缘计算手势的质心。FCTR操作只适用于单手或手与用户的脸。对于具有多个皮肤或类皮肤色调的背景,轮廓数超过2,FCTR给出一些反馈来调整背景。
总之两种方法都是要得到手部轮廓的质心,质心的运动轨迹即手的运动轨迹。
SoC架构
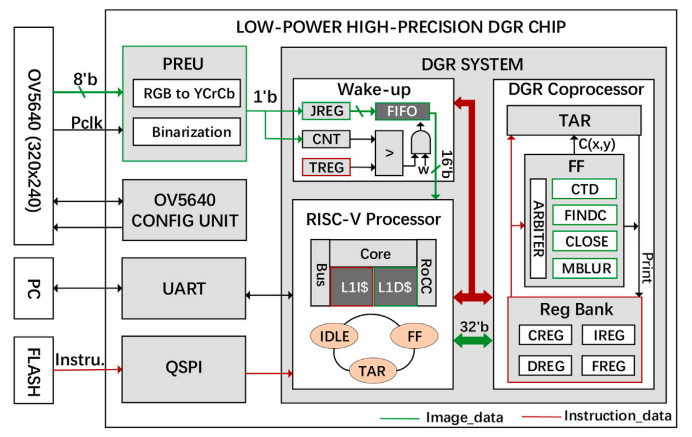
RV处理器有4KB的L1I cache以及24KB的L1D cache.
预处理单元PREU接收到来自摄像机的图像时,对图像进行预处理并把处理过后的图像传输给唤醒单元wake-up unit,唤醒单元对预处理后的二值图像进行相加(也就是统计肤色像素的个数)并存入CNT寄存器中,当一个完整的图像输入完成后,与预设的TREG寄存器的值比较,比较的结果决定下一帧是否写入FIFO以及是否唤醒后续的识别进程。
DGR协处理器如图所示:
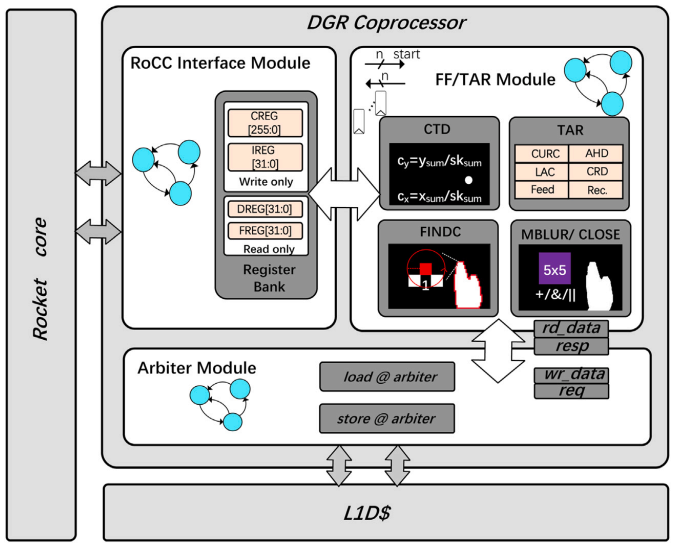
DGR协处理器通过RoCC接口与RV处理器相连
CREG用来存储参数,改变参数可以在不同距离、不同移动速度下提高DGR精度,即通过修改CREG中的参数来使系统适应不同场景。IREG寄存器用来控制协处理器的运行,来自下图所示的扩展指令
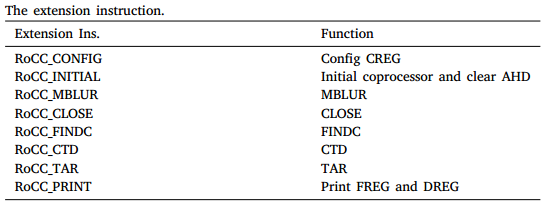
- RoCC_CONFIG:配置CREG寄存器
- RoCC_INITIAL:初始化协处理器和清楚AHD(accumulated historical displacement)
- RoCC_MBLUR:中值模糊运算(5 × 5的卷积核)
- RoCC_CLOSE:闭运算
- RoCC_FINDC:寻找图像轮廓,算法为八邻域算法(eight-neighborhood search)
- RoCC_CTD:计算质心
- RoCC_TAR:跟踪和识别
- RoCC_PRINT:打印FREG和DREG
DREG和FREG存储来自TAR的输出方向和反馈以供打印。